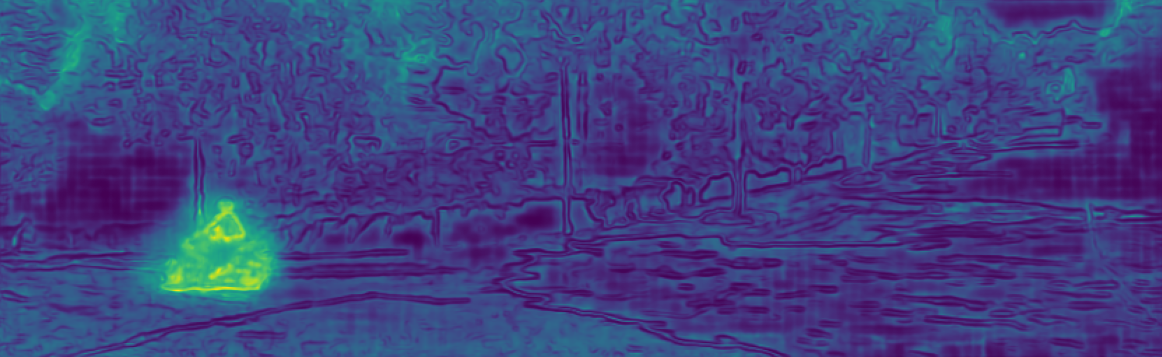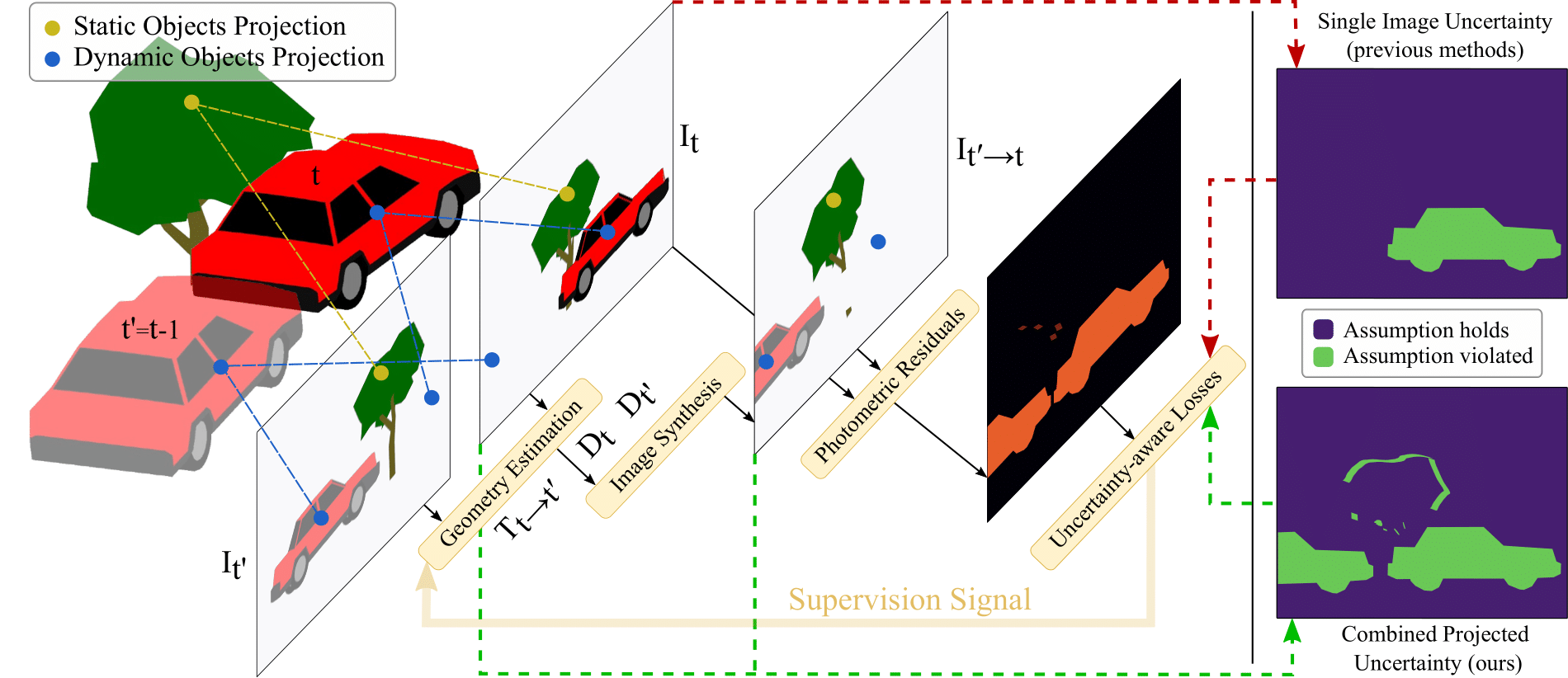

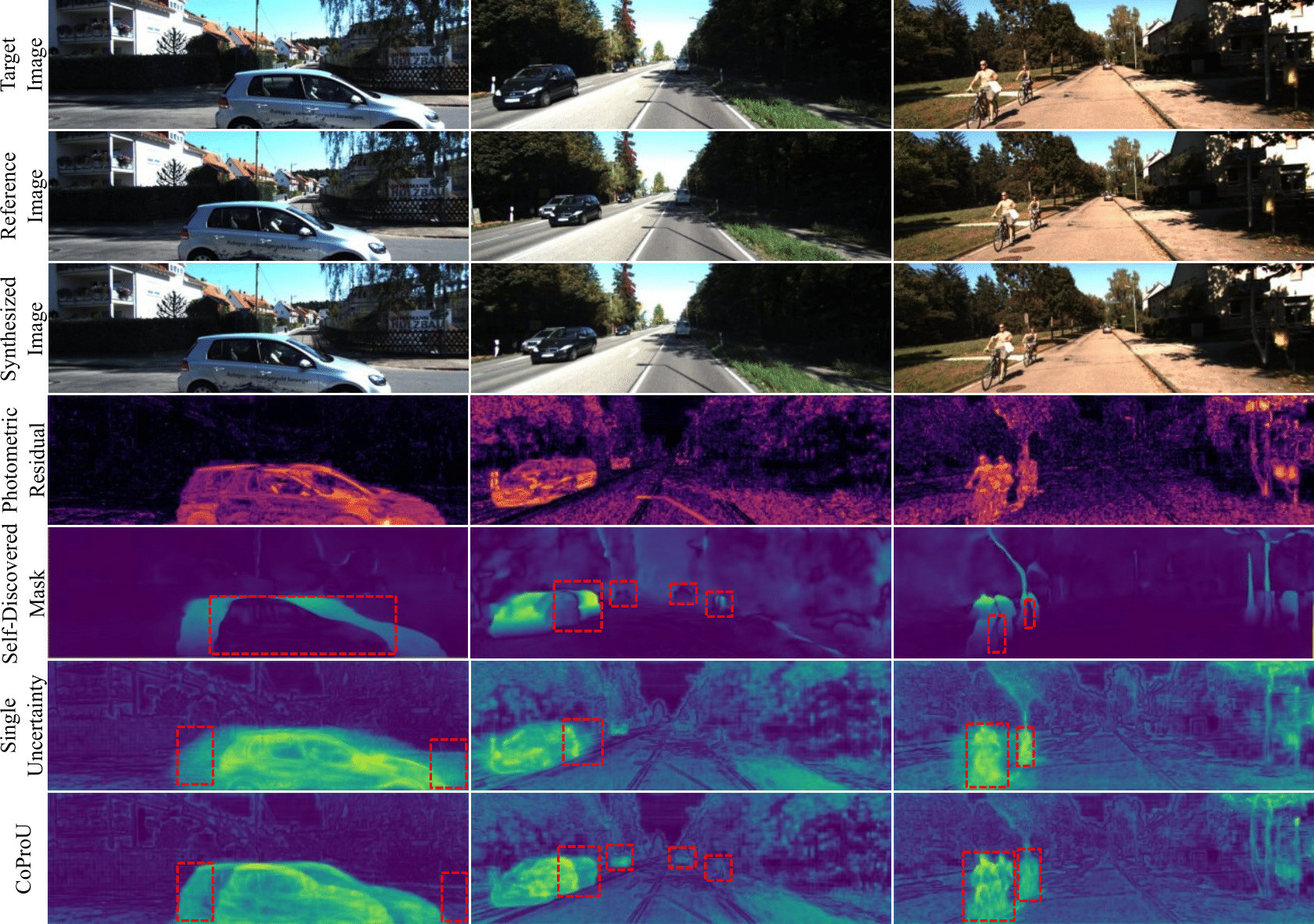

CoProU (Ours)

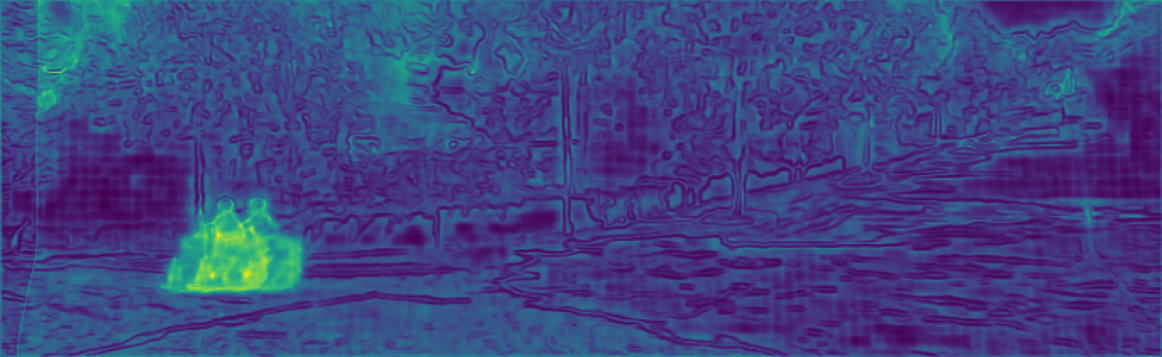
D3VO - Single Uncertainty
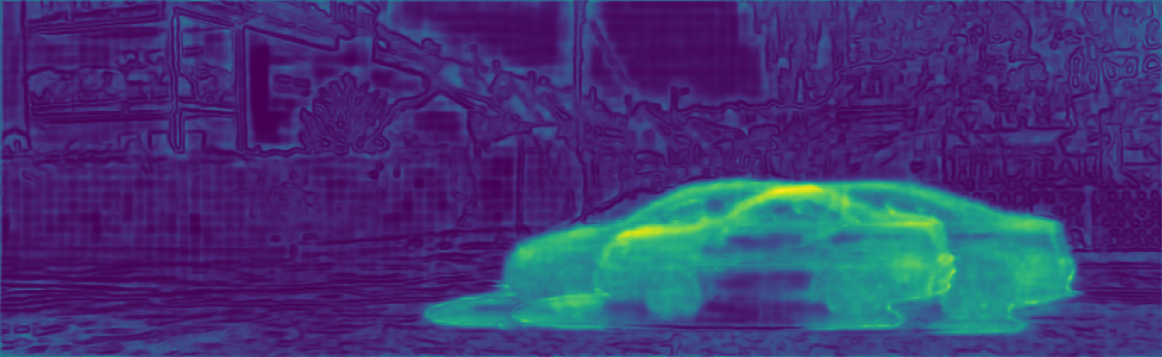
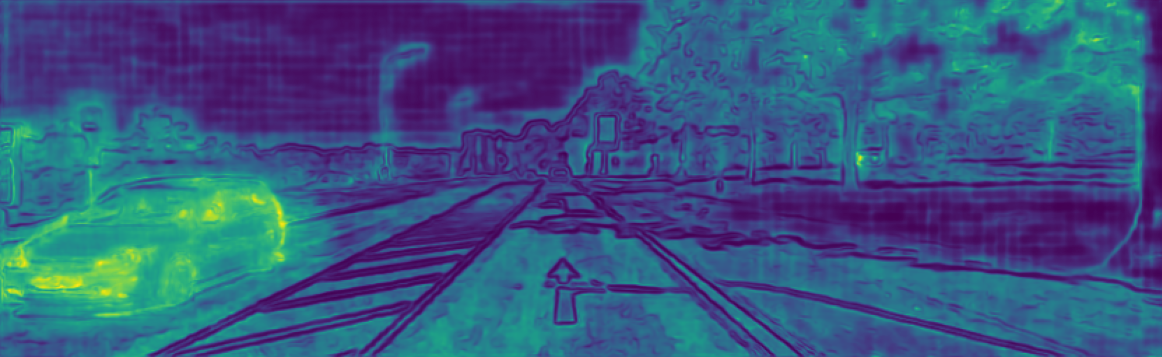
CoProU (Ours)
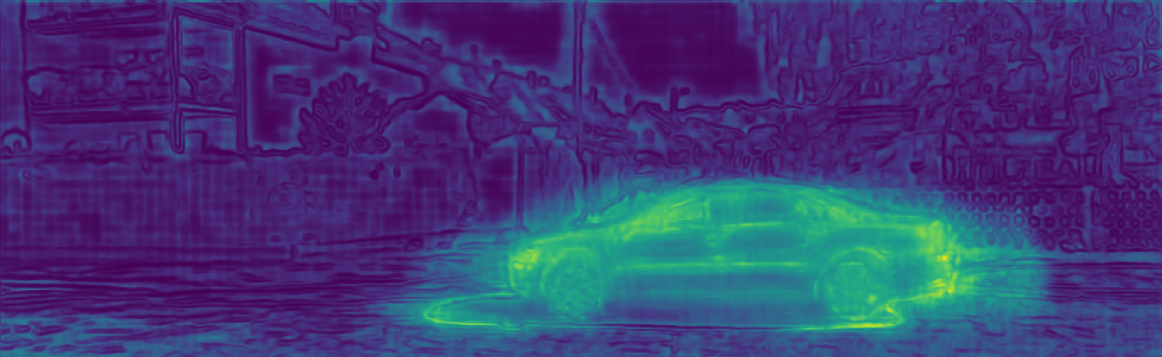
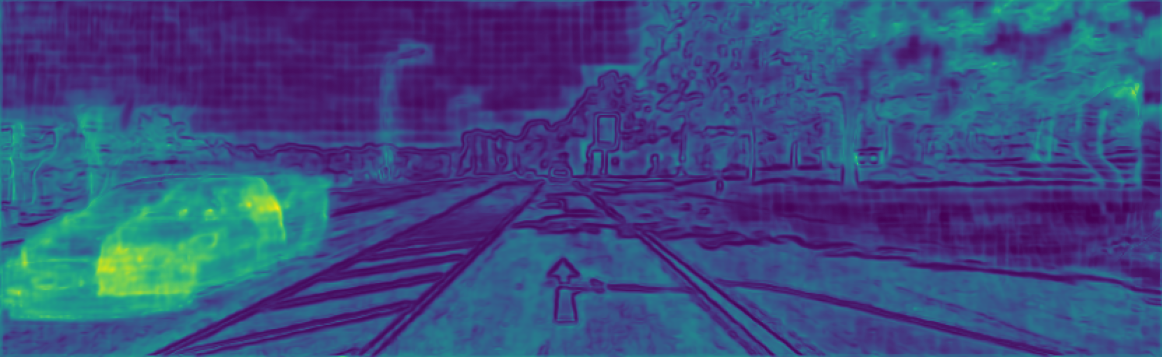
D3VO - Single Uncertainty